Воздействие различных шумов на ластоногих
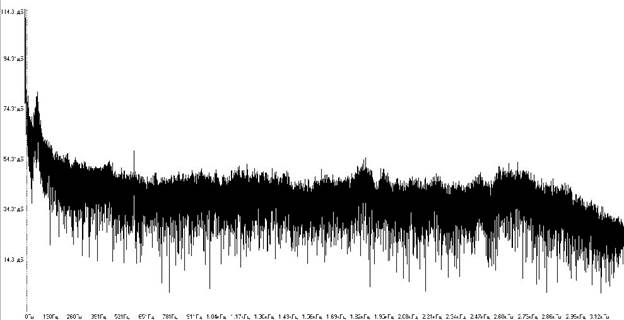
Рисунок 1. Спектр шума на акватории Кольского залива вблизи губы Тюва.
Из рисунка 1 видно, что на акватории уровень подводного шума составляет 56-70 дБ, причем максимум приходиться на сверхнизкие частоты (до 100-140 дБ), уровень низких составляет 70-80 дБ и после 300-350 Гц постепенно снижается до значений в 25-30 дБ.
В помещении, где проходил эксперимент, находились: бассейн размерами 2х2х1м., установка для генерации звукового сигнала, видеофиксации поведения животного и записи шумового фона.
Установка состояла из: ноутбука, на котором были установлены программы по генерации звука (SweepGen 3.5.2), программа для видеонаблюдения (WebCanMonitor 5.2), программа для записи и анализа акустического сигнала (Анализатор Сигнала 2007); веб-камеры Genius e-messenger 112; гидроакустической антенны ЦГП-4а и цифрового модуля БВС-ЦМ; акустического усилителя и широкополосных колонок.
При помощи программы SweepGen генерировались 2 типа непрерывных детерминированных тональных шумов: линейное возрастание частоты звучания и звучание случайной частоты в заданном диапазоне. Усилитель был подключен к аудио-выходу ноутбука и усилив сигнал, передавал его на колонки. В тоже время круглосуточно велось видеонаблюдение за животным с помощью веб-камеры и программы WebCanMonitor, которая позволяла создавать видеофайлы продолжительностью по 10 минут. Для удобства анализа, а также экономного расходования дискового пространства, видео записывалось в avi формате с кодеком видеосжатия DivX® 6.8.2 Codec (2 Logical CPUs), при разрешении 320 на 240 точек, с цветопередачей в градациях серого. Четыре раза в сутки производилась минутная запись шумового фона с помощью гидроакустической антенны ЦГП-4а. Что позволяло выявить частотные и мощьностные характеристики шумового фона (в соответствии с СИ использовались децибелы, рассчитанные относительно давления в 1 мкПа).
Для того чтобы во время эксперимента вода не попала на работающую электротехнику, приборы были покрыты чехлами из полипропилена, а компьютер был огорожен занавесью, также из полипропилена.
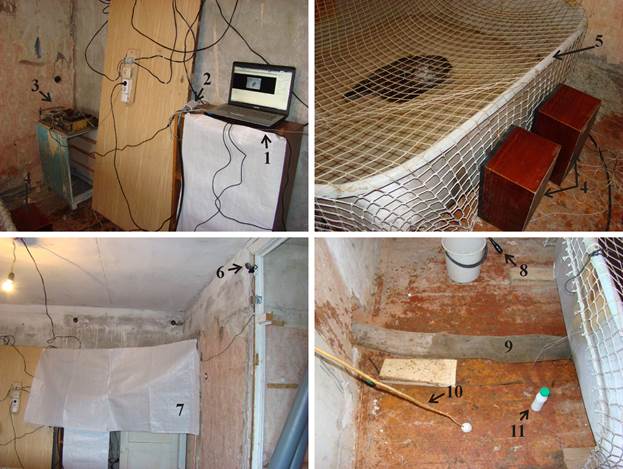
Рисунок 2. Установка для проведения эксперимента.
1- компьютер; 2- Блок управления гидроакустической антенной; 3- усилитель; 4- колонки; 5- бассейн; 6- веб-камера; 7- занавеска; 8- гидроакустическая антенна; 9- слив воды; 10- таргет; 11- объект для поиска
Для тестов на пищевую мотивацию и общее состояние животного использовались объекты, изображенные на рисунке 2. Двигательная активность изучалась с помощью видеозаписи, а пищевая мотивация с помощью тестовых команд, предъявляемых во время кормления. Кормление проходило 4 раза в сутки в 9:00, 15:00, 21:00 и 3:00, за время кормления скармливалось 200г. мойвы, единовременное подкрепление составляло 25-30г., то есть 1 рыбка. Тестовые команды включали в себя команды на стабильность и моторную функцию. Первая команда была «таргет»: по команде животное должно было удерживать таргет вплоть до подачи бридж-сигнала (свистка), в случае верного выполнения животное получало поощрение (кусочек рыбы весом 25-30г.). Вторая команда «ищи»: животное также удерживает таргет, затем подается команда «ищи» (жестом или голосом), животное должно найти и обозначить касанием объект (бутылочка из-под йогурта, подвешенная у края вольера). Данные команды чередовались в псевдослучайной последовательности (не более 2 одинаковых команд подряд), для того чтобы животное не могло распознать зависимость и выполняло именно подаваемые команды. Так же критерием служил факт того берет или не берет нерпа корм из рук экспериментатора.
